CiA® 415: CANopen sensor profile for mobile machines

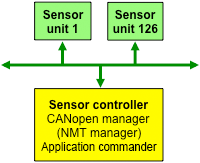
This application profile specifies the communication interfaces for sensors and host controllers used in embedded sensor control networks for road construction and earth-moving machines, such as pavers, compactors, graders, dozers, mills, heaters, and trucks. The host controller, referred to as the sensor controller, incorporates both the CANopen manager functionality and the management functions for the sensor control application.
Profile-compliant sensors require a sensor controller that supports self-configuration of the CANopen network. During start-up, the sensor controller scans the entire network for available sensors. It then reads and verifies the number of process data entries provided by each sensor using a plausibility test. If the number is valid, each process data entry is read. The sensor controller then creates the necessary TPDOs (transmit process data objects) for each device and downloads them to the sensors via SDOs (service data objects). The PDO mapping parameters are configured first, followed by the PDO communication parameters. This procedure is repeated for the required process data, creating RPDOs (receive PDOs) for each sensor. After this process, the sensor controller switches the involved devices to the NMT (network management) operational state and tests whether the established PDO connections are functioning correctly.
Important system information is transferred with high priority using defined events for requesting and responding to available sensor data, transmitting generic errors, machine states (e.g., stop, working), leveling statuses (e.g., manual, auto), closed-loop control (e.g., automatic on/off), and the start of a new project (reset mode). This ensures that the sensor controller device (typically residing in the on-board computer) is always informed about this information.
The general device parameters include information about the machine (type, manufacturer, serial number, etc.), provided and required process data, reference points for measured coordinates, date and time, and operating hours. Process data encompasses absolute 3D position, angle position, curvilinear coordinates and angles, geographical coordinates, various deviation values, steering angle, machine speed, traveled distance, tool rotational speed and extent, thickness of the laid or removed layer, material volume and mass, flow values, various temperatures, road evenness, environmental conditions (e.g., wind, humidity, atmospheric pressure, and rainfall level), and water tank levels. For each consumed and provided process data, a reference value parameter for configuring a set-point is specified.
The physical layer definitions conform to the CiA 301 (CANopen CC) and CiA 436 profiles for construction machines. The latter also defines the error behavior of the sensor control application.
CiA 415 version 1.0.0 was developed in 2003. The predecessor of this specification was jointly developed by the OSYRIS (Open System for Road Information Support) consortium (now terminated) and the European Asphalt Pavement Association (EAPA). CiA 415 version 2.2.0 was released in April 2009.
| Title | Details | Published Size |
Status Action |
|---|---|---|---|
 CiA 301 version 4.2.0
CANopen application layer and communication profile
CiA 301 version 4.2.0
CANopen application layer and communication profile
|
ScopeThis specification specifies the CANopen application layer. This includes the data types, encoding rules and object dictionary objects as well as the CANopen communication services and protocols. In addition, this specification specifies the CANopen network management services and protocols. This specification specifies the CANopen communication profile, e.g. the physical layer, the pre- defined communication object identifier connection set, and the content of the Emergency, Time- stamp, and Sync communication objects. |
2011-02-21 3 MB | PAS Login |
|
CiA 436-1 version 1.1.0
CANopen application profile for construction machines - Part 1: General definitions
|
ScopeThis application profile provides general definition as well as recommendations for using CANopen control networks on construction machineries. In addition, this applicat ion profile introduces the virtual control architecture on construction machineries, integrating the engine control system, the drivers’ desk, the sensor control system, the transmission control system, the fleet management control system as well as the co ntrol system for the superstructure respectively implement. |
2010-06-30 530 KB | DSP Login |
|
CiA 415 version 2.2.0
CANopen application profile for sensor systems in road-construction and earth-moving machines
|
ScopeThe CANopen sensor system application profile for road construction and earth moving machines specifies the communication interface for sensors as well as the sensor control unit. The profile is suitable for a broad range of machine types (e.g. paver, compactor, grader, dozer, mill, heater and truck). NOTE The first version of this profile has been jointly developed with the OSYRIS (Open System for Road Information Support) consortium (www.osyris.org) and the European Asphalt Pa vement Association (EAPA). |
2009-04-22 2 MB | DSP Login |